智能機器人教育部工程研究中心


中心主任
甘中學
中心簡介
智能機器人教育部工程研究中心於2018年2月獲批成立🧑🏼🦳🐢。中心主動對接國家在人工智能與機器人領域的重大需求,致力於突破製約智能機器人發展基礎性、前沿性的重大科學問題和關鍵技術瓶頸,開展多學科交叉融合的研究🧏🏿♂️,集聚培養具有前沿科技視野👷🏽、多學科交叉功底、豐富項目經驗的多類型及綜合型高層次人才🪑,形成國際化的人才培養體系和人才高峰機製⛄️,服務社會。
組織架構及團隊
組織架構🤘🏽🙆♀️:
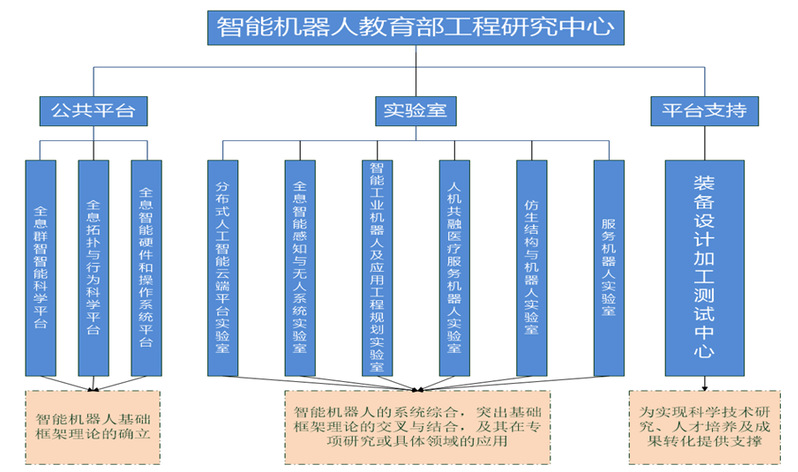
對接國家戰略🧑🏻⚕️,主攻前沿基礎,完善人才培養
團隊建設
中心主任🧑🏿🍼:甘中學
中心副主任:張立華 張 丹
高端人才:張 丹 周 華 孫雲權 朱雲龍 宋 梁 楊士寧 徐 敏 王洪波 郭士傑
青年人才🤽🏿:董誌巖 康曉洋 方虹斌 張曉旭 羅靜靜 陳遲曉 王軍華 範佳媛 李偉等
研究方向及內容
本中心重點發展新一代人工智能與機器人融合科學技術體系🛌🏼,通過建設全息群智智能、機器人全息拓撲與行為🤸🏽♂️👨🏻💼、機器人全息智能硬件與操作系統共性技術平臺、裝備設計加工測試中心及相關實驗室,推動智能機器人在基礎研究、關鍵共性技術👩🏼💻🪽、產品孵化及產業化方面的發展🏌🏽♂️,培養多學科交叉🫅🏿🚄、適合新工科發展的人才🙅🏽♀️🎅。
建設進展及主要成果
部分組織和承擔的重大科研項目:
三元空間群智智能基礎理論與關鍵技術前瞻性研究,上海市科委🟦,負責人:甘中學
基於增強神經環路調控的手指/腕協同康復訓練機器人關鍵技術研究,國家自然科學基金委𓀀,負責人🧑⚖️:王洪波
感算存一體的智能傳感電路設計方法與體系結構研究,國家自然科學基金委,負責人🎠:陳遲曉
神經接口器件微納製造中的軟性可拉伸行為及控製技術研究🙎🏼,國家自然科學基金委👆🧖🏿,負責人:康曉洋
基於高分辨率遙感衛星圖像的土地利用監控技術☝️,上海市科委,負責人:範佳媛
智能大腿假肢關鍵技術及應用,國家重點研發計劃,課題負責人:徐鑒
仿蠕蟲移動機器人結構-驅動-協同非線性動力學與實驗,智能大腿假肢關鍵技術及應用,國家自然科學基金委🧆,課題負責人🙂↕️:方虹斌
崇明區5G應用發展規劃,政府合作項目,負責人:宋梁
組織國際學術會議:
2019 International Conference on Industrial Applications of Big Data and Artificial Intelligence (BDAI 2019)

地址📶:上海市楊浦區邯鄲路220號 郵編:200433 電話🎅🏽:(86)021-65642222
Copyright©2016意昂3平台版權所有 滬ICP備:22746463
 工研院二維碼
工研院二維碼
 研究生會二維碼
研究生會二維碼